雷达车辆检测器应用案例与评估
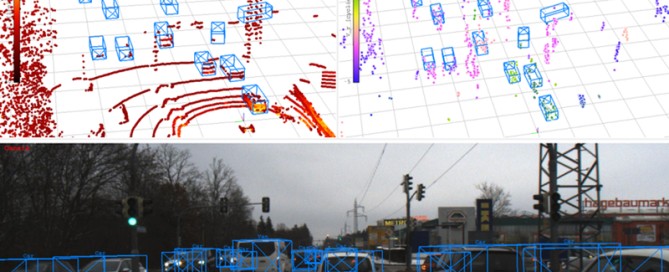
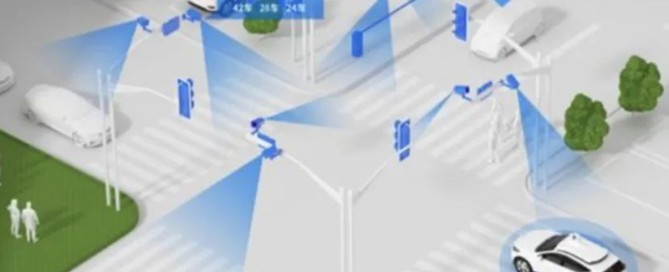
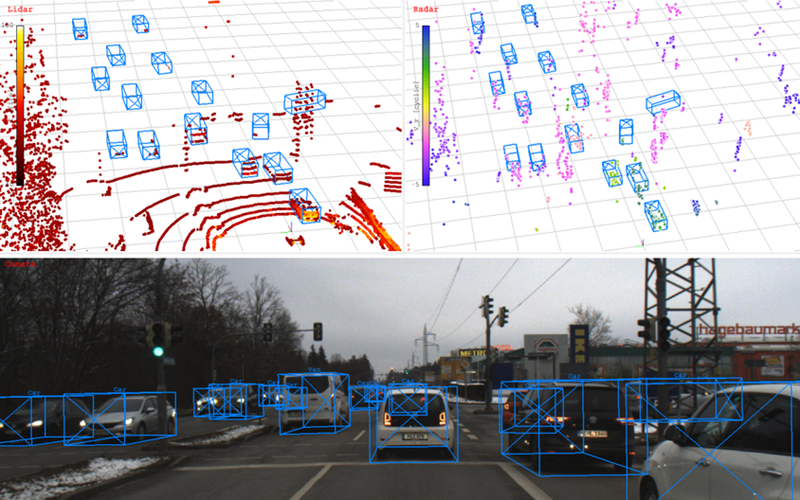
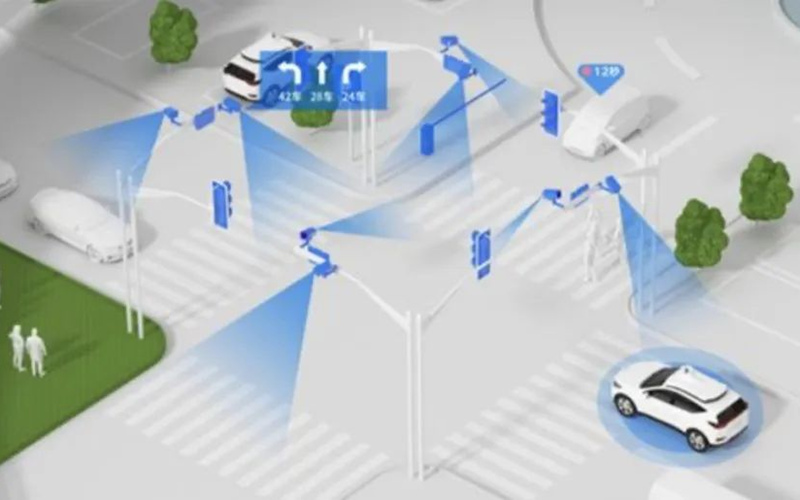
雷达车辆检测器应用案例与评估 一、什么是雷达车辆检测器 雷达车辆检测器是利用电磁波发射与回波接收来识别车辆存在、速度、车道占有率、流量与车头时距等交通要素的专用设备。与地感线圈、视频检测、磁阻与超声波方案相比,雷达方案具备免开挖、全天候、抗雨雾尘、低维护等优势,已成为智慧交通(ITS)与车路协同(C-V2X)基础感知层的重要组成。 核心能力包括: 实时检测:0.1秒级刷新率,适应城市交叉口与高速场景。 多车道覆盖:单台可覆盖1–8车道(取决于波束、安装高度与俯仰角)。 多指标输出:存在检测、速度、长度、车型、轨迹、流量、占有率、平均速度、95分位速度、车头时距等。 联动控制:通过RS485/RS232、以太网、DI/DO、CAN、4G/5G等接口与信号机、工控机、边缘网关对接。 自学习与抗干扰:对多径、侧向机动车、行人/非机动车干扰具有鲁棒性,并支持固件算法持续升级。 二、工作原理与关键技术 1、电磁波体制 24 GHz/60 GHz/77 GHz频段:24 GHz适合中近距低成本覆盖;77 GHz具备更窄波束、更高角分辨率与速度分辨率,适合多车道精细化检测与轨迹跟踪;60 GHz常用于短距与室内停车引导。 FMCW(线性调频连续波):主流体制,通过测量拍频获得距离信息;同时利用多普勒频移估计速度,结合多接收通道实现角度估计(DOA)。 MIMO雷达:采用多发多收阵列形成虚拟孔径,提高角分辨率,支持多目标分离与轨迹级检测。 2、信号处理链路 预处理:IQ采样、窗函数、距离-多普勒二维FFT、恒虚警检测(CFAR)。 角度估计:MUSIC、ESPRIT或DBF波束形成,生成距离-速度-角度三维点云。 目标关联与跟踪:JPDA/GM-PHD/多假设跟踪(MHT)或基于卡尔曼/扩展卡尔曼/UKF的多目标跟踪,输出轨迹级车辆信息。 语义分类:基于目标雷达截面积(RCS)、长度、速度稳定性、加速度与横向速度,结合机器学习/深度学习模型实现车型与非机动车/行人区分。 数据融合:与视频、地磁或V2X消息融合,提升低速排队场景下的静止目标保持能力与遮挡鲁棒性。 3、性能指标参考 距离范围:0.5–150 m(路口);0.5–250 m(高速)。 速度范围与精度:0–200 km/h,误差≤±1 km/h或±1%。 角分辨率:0.5–5°(视阵列与频段而定)。 检测精度:存在检测准确率≥98%,速度准确率≥97%,占有率误差≤3%(标准工况)。 传输与时延:端到端时延≤200 ms,满足自适应信号配时与超限超速抓拍触发需求。 可靠性:MTBF≥30,000 h,IP66/IP67,工作温度-40–+85℃,抗风≥8级。 三、应用场景与价值 1、城市交叉口自适应控制 实时获取各进口道的排队长度、占有率、流量与到达率,驱动自适应配时或相位微调,降低平均延误与停车次数。 检测停止线与上游排队双区,避免因视频夜间逆光、雨雾导致的丢检。 2、电子警察与违法抓拍联动 联动相机进行闯红灯、压线、借道左转、机非混行等违法检测,雷达提供可靠的触发与速度矢量,降低误触发。 高速场景配合高清相机完成超速抓拍与区间测速,支持多车道速度识别与车道归属。 3、高速公路与快速路监测 多目标轨迹级检测,输出车道级流量、速度、旅行时间;异常事件(逆行、停车、掉落物)快速识别。 雨雾雪等低能见度下持续工作,保障路网运行监测的连续性。 4、智慧停车与场库出入口 出入口车型识别、余位核算、车道占用监测;地面车位可通过短距毫米波实现“车位在位”检测,替代地磁或视频在极端光照下的不足。 5、收费站与多车道自由流(MLFF) 在自由流收费环境中完成车辆存在与速度的高精度检测,辅助分车道识别与车型判别,保证计费准确性。
{kind=link}
{kind=link}