
雷达在安防领域的优势
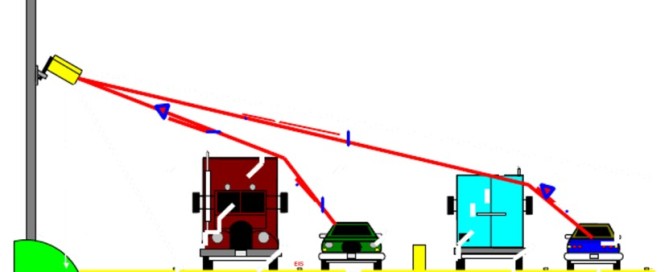
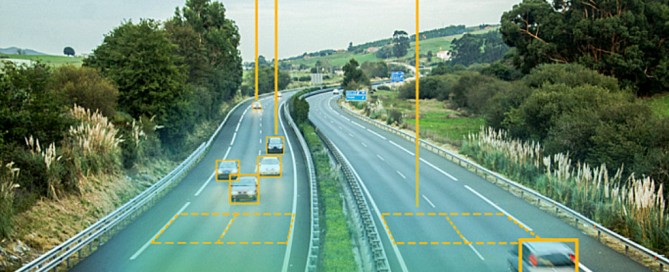
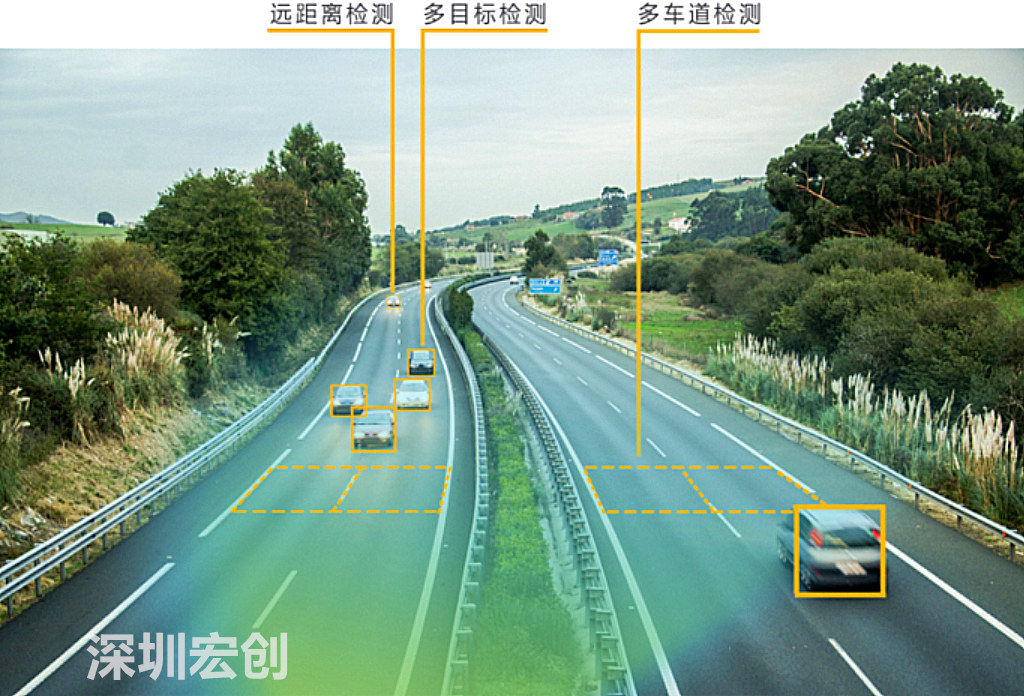
雷达在安防领域的优势 随着科技的不断发展,电子防范技术作为安全防范技术的一个重要发展方向,得到了蓬勃快速的发展。其中,随着电子水平及制造工艺的不断发展,电子器件不断小型化,低价化,民用小型化雷达被开发出来,并应用于各类安防系统中。 雷达在安防领域用途较广 雷达作为一种重要的目标检测手段,以前多用于军事,近年来,随着技术发展,雷达已经进入安防领域。与红外监控、视频监控等其他产品相比,安防雷达具有体积小、质量轻、远距离分辨力强、抗干扰性能优、可靠性高等特点,可以提供具有一定高度和厚度的连续的毫米波雷达墙,没有钻越和跳越的可能,不仅能对侵入目标进行定位,而且可以获取监控场景内移动物体的速度、方向、距离、角度信息,24小时无间隙监控。 安防雷达的安全防护优势明显,可以支持非常丰富的应用场景。比如,毫米波雷达就已经被广泛应用在汽车辅助驾驶领域,用以检测行人和前车,实现防撞预警;再如,在智能家居场景中,雷达传感器可以被用于开关控制、入侵检测、智能开门器等方面,方便大众生活。 安防雷达性能优越,可应用范围广泛,产品竞争优势明显,在安防市场中的普及率不断提升。其产品研发与生产对企业的实力要求较高。在安防市场中,安防雷达是进入壁垒较高的子行业之一。 与监控系统结合 拓展应用领域 相比光学探测的方式雷达能够进行大范围的搜索,不受光学能见度的影响,获取的运动目标信息准确度高,但所获取的目标信息较为抽象,例如,摄像机在检测玻璃时会有困难,而雷达却能检测到。如果能将这两个系统进行集成,将有助于广域视频监控领域的发展,更可靠地支持避障等应用。 例如,在智慧交通领域,将视频数据和雷达数据融合应用,可以输出车道、车流量、速度、状态、队列、时距、间距、区域停车数、空间占有率以及时间占有率等多项交通数据,支持智能动态信息实时显示,还可以实现车辆轨迹跟踪,并通过视频将检测目标可视化,甚至可以实现智能信号控制。雷达技术的应用,有效地排除了雨雪雾等天气的影响,得到的交通数据精准度高,为智慧交通的实现提供了可靠性数据。 安防雷达是安防市场上兴起的一种新的技术手段,目前雷达探测在国内外已被广泛应用。结合视频监控系统,可以服务于机场,港口,油井油田,电力电网,铁路交通,哨所等市场。随着社会、国家对公共安全的重视,雷达与视频联动系统具有良好的市场应用需求和前景。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}