高效精准:雷达测速仪如何解决多场景下的交通治理难题?
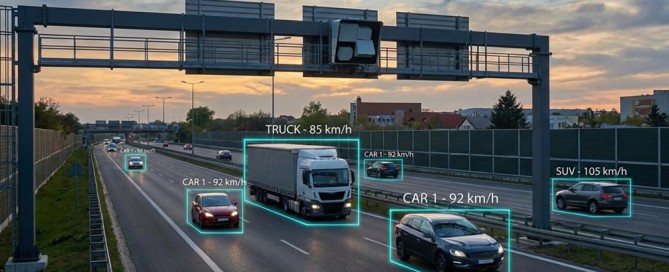
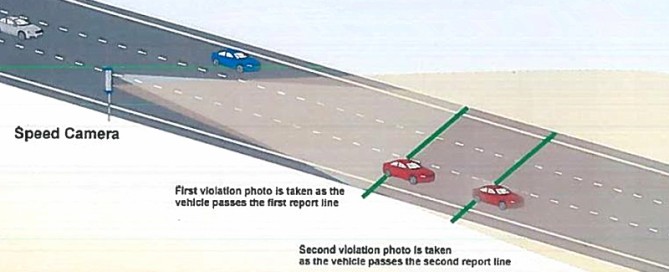
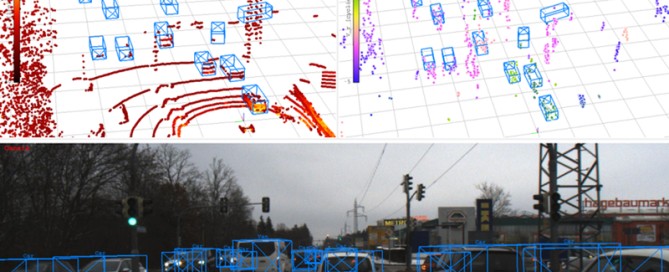
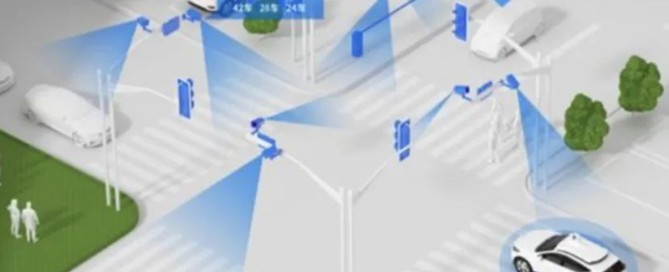
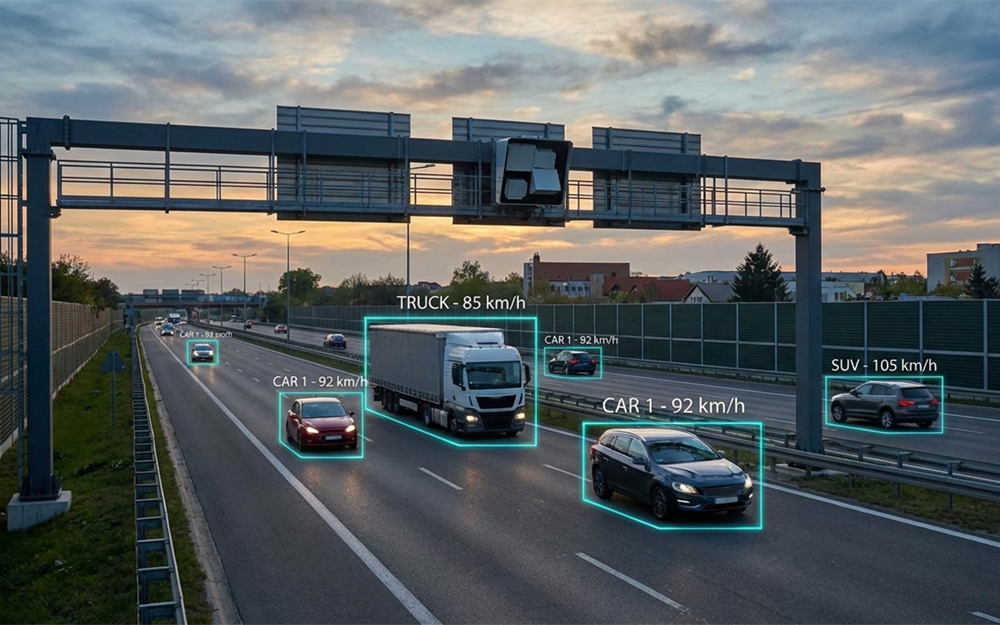
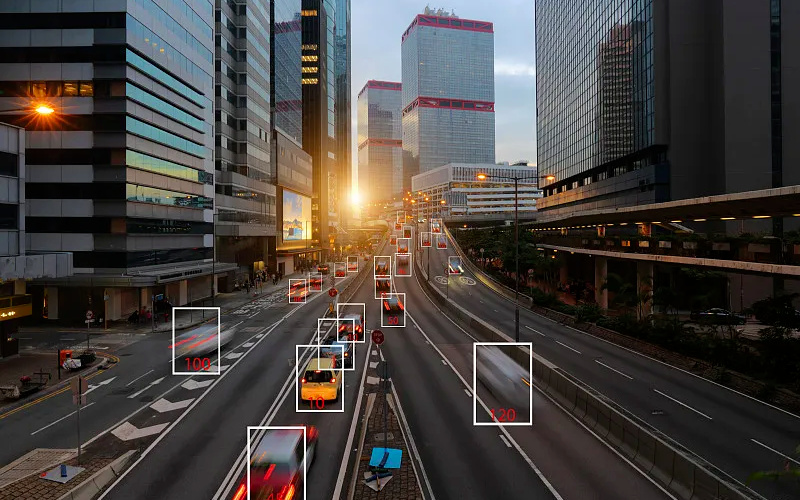
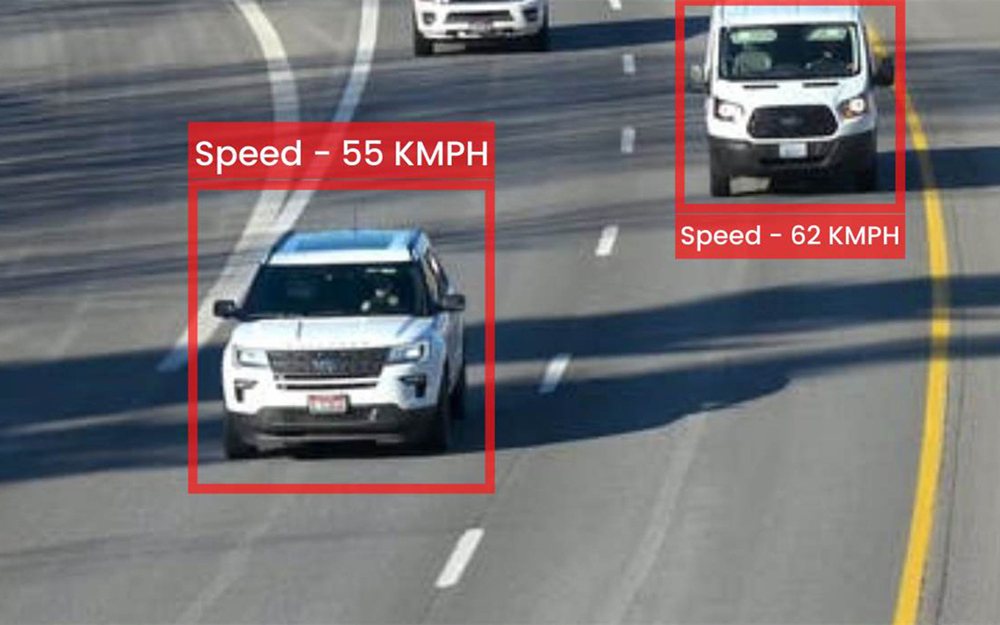
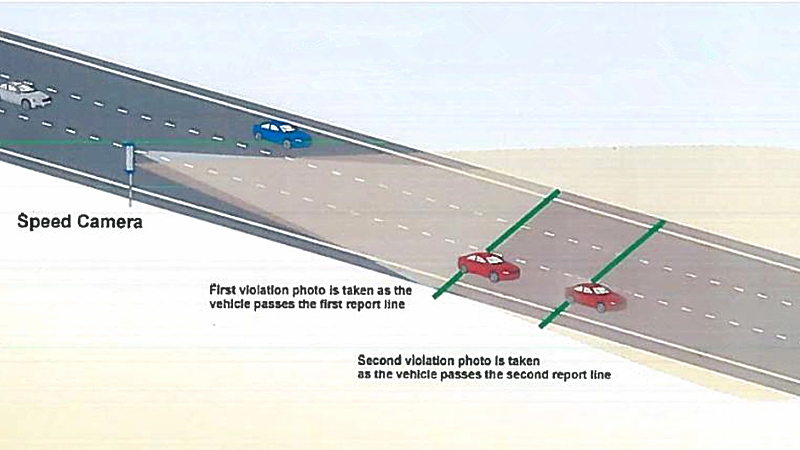
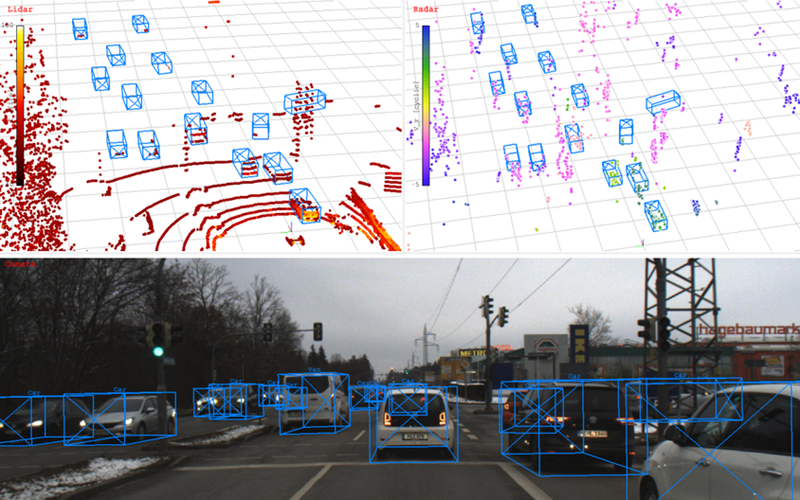
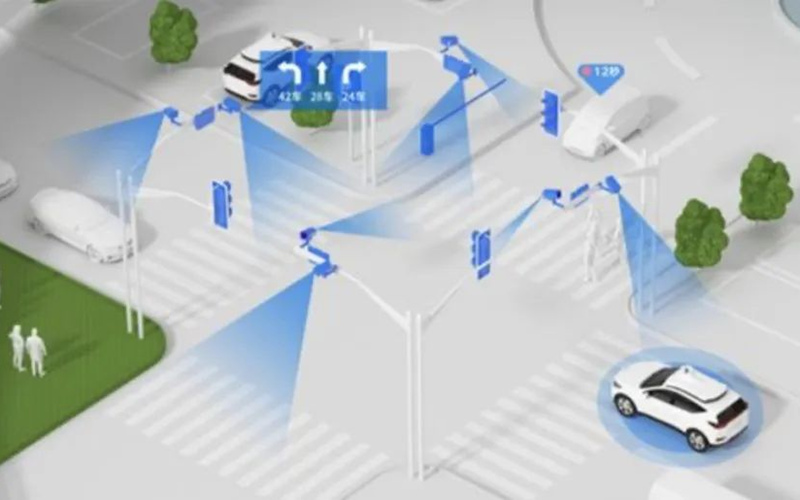
高效精准:雷达测速仪如何解决多场景下的交通治理难题? 在现代智慧交通体系中,数据采集的准确性与实时性是管理决策的基础。随着车流量的爆发式增长,传统的监测手段已难以满足复杂的路况管理需求。作为交通执法与安全预警的核心硬件,雷达测速仪(尤其是多目标雷达技术)正凭借其卓越的感知能力,成为解决各类交通难题的关键利器。一、 解决多车道并行的“识别难题”在繁忙的城市主干道或高速公路上,多车并行是常态。传统的单目标雷达往往无法在多辆车同时经过时,准确判定哪一辆车存在超速违章行为,容易产生证据争议。雷达测速仪的应用价值: 高精度的多目标雷达测速仪具备强大的空间分辨能力,能够同时锁定并跟踪多个车道上的数十个目标。它不仅能给出实时的速度数值,还能提供车辆的具体位置信息。这种“点对点”的精准对应,彻底解决了多车混行背景下的违章取证难题,确保了非现场执法的公正性与严谨性。二、 提升复杂路段的“安全预警能力”隧道入口、长下坡、大弯道以及施工路段一直是交通事故的高发区。在这些视觉盲区较多或路况复杂的区域,单纯依靠静态标志牌往往难以起到足够的震慑和提醒作用。雷达测速仪的应用价值: 通过部署雷达测速仪配合反馈大屏(DFS),系统可以实时感应来车速度。一旦检测到车辆超速,系统会立即触发高亮度显示或语音警示。这种动态交互式的提醒,能够有效引导驾驶员主动降速,显著降低因超速引发的追尾及侧翻风险。在隧道和桥梁等特殊场景下,雷达测速仪的稳定性使其能够全天候工作,不受光照、雨雪或雾霾的影响,填补了视觉感知系统的短板。三、 优化城市路口的“通行效率”城市路口的交通拥堵往往与车辆加塞、违停以及对交通流感知不足有关。管理者需要掌握的不单是“是否有车超速”,更是“路口整体运行状态”。雷达测速仪的应用价值: 多目标雷达测速仪不仅是一台执法设备,更是一个高精度的交通传感器。它能够实时监测路口的排队长度、车辆怠速状态以及各车道的流量分布。通过将雷达采集的速度与流量数据接入指挥中心,交通管理系统可以动态调整信号灯配时,减少无效等待时间。对于违规占用公交车道、违法掉头等行为,雷达测速仪也能提供轨迹支撑,协助实现全方位的路权管理。四、 助力公路资产的“预防性维护”大型车辆或超限车辆的高速行驶对桥梁和路面具有极强的破坏性。如何有效监管重点路段的车辆速度,直接关系到公路使用寿命。雷达测速仪的应用价值: 在重点桥梁和重要路段安装雷达测速仪,可以实现对大型货车的专项速度监管。通过长期积累的测速数据,管理部门可以分析该路段的交通载荷强度,从而制定更科学的维护计划。这种从“事后维修”转向“事前管控”的模式,极大提升了交通基础设施的安全保障水平。从简单的速度测量到复杂的多目标轨迹追踪,雷达测速仪的应用已经深入到交通治理的每一个末梢。它不仅解决了执法取证的精准度问题,更在预防事故、提升通行效率及保护基础设施方面发挥着不可替代的作用。对于追求高效、科学管理的现代交通体系而言,多目标雷达测速仪无疑是实现智慧化转型的核心支撑。




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}