
微波雷达:智慧交通的感知基石,路侧设备的进化革命
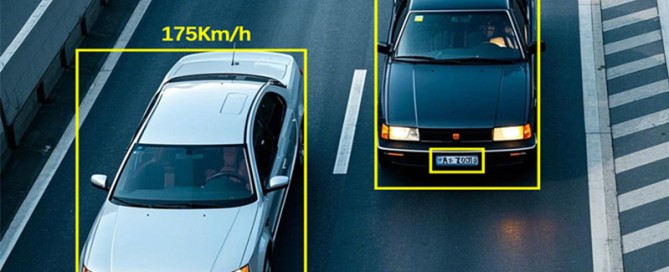
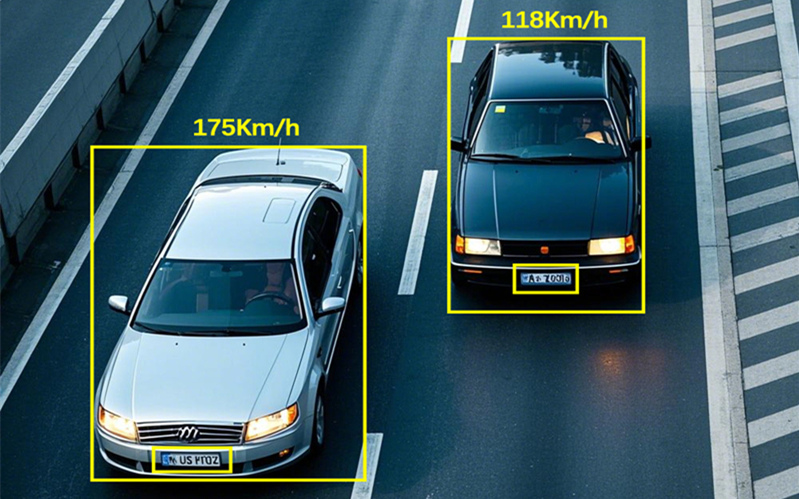
微波雷达:智慧交通的感知基石,路侧设备的进化革命 微波雷达技术凭借其全天候工作能力、高精度探测性能及日益提升的性价比,正在重塑交通管理系统的感知层,成为智慧交通体系建设不可或缺的核心技术装备。随着2025年《雷达无线电管理规定》明确交通路侧雷达使用92-94GHz频段的政策落地,以及中国毫米波雷达市场规模突破130亿元并保持23.3%年复合增长率的高速发展,微波雷达产业正迎来前所未有的机遇与挑战。 一、技术演进:从基础测速到全息感知的跨越 微波雷达在交通领域的应用始于基础测速功能。典型的太阳能速度反馈标志牌,通过多普勒工作原理对车辆发射微波,当车辆进入200米探测范围内,雷达会实时捕捉速度并在LED屏以红(超速)绿(正常)双色显示,测速误差控制在±3%以内,车速检测范围高达255公里/小时。这类设备无需破坏路面,仅需太阳能或市电供电即可在-15°C ~ +60°C环境下稳定运行,广泛应用于学校、高速事故多发路段等场景。 随着技术进步,微波雷达从单一测速向多维度交通流感知跃迁。新一代交通场景雷达具备79-81GHz高频段(符合旧规)和92-94GHz频段(符合新规)工作能力,实现了革命性突破: 多目标追踪:同时锁定256个目标,95%以上准确率捕获车辆轨迹 全要素检测:实时输出车流量、车道占有率、车型分类(大/中/小型车)、排队长度等12类参数 事件智能诊断:自动识别逆行、急停、变道等交通异常事件,准确率超95% 微波雷达的核心优势在于其全天候适应性。无论是暴雨、浓雾、强光还是夜间环境,其微波穿透能力均可保障稳定检测,这是视频检测技术难以企及的。例如河北石太高速部署的92GHz雷达,在350米超距探测中仍保持0.2米定位精度,实现全天时、全天候超视距状态感知。 二、政策驱动:92-94GHz频段重塑产业格局 2025年1月出台的《雷达无线电管理规定》成为行业分水岭。政策明确规定:自2026年1月1日起,交通路侧雷达必须使用92-94GHz频段。这一变革旨在解决既有79-81GHz雷达的同频干扰问题,但也给产业带来严峻挑战: 量产困境:92-94GHz芯片量产技术尚未完全突破,国内具备量产能力的厂商屈指可数 成本压力:城市交管部门明确表示“若价格超出现有水平将不再采购” 新旧交替:财政压力下,80GHz设备不会立即淘汰,产业过渡期可能延长 面对挑战,领先企业已布局破局。以理工睿行与河北交规院的合作为例,其突破三大核心技术: 自主研发芯片:完成94GHz多通道收发毫米波雷达芯片流片验证 柔性生产模式:根据项目周期预排产,缓解芯片生产周期压力 算法深度优化:通过近端宽波束+远端窄波束技术,实现0.2米全距离段精度 三、场景革命:从高速路网到城市神经末梢 微波雷达的部署场景正从主干道向全路网毛细血管延伸,不同频段与形态的产品满足差异化需求: 高速公路场景 长距监控:如RTMS进口检测器覆盖12车道,探测距离达76米,内置IP摄像头实现数据与视频联动 事件预警:92GHz雷达在秦唐高速布设300套,实时分析交通流,降低事故率30% 车型分类:CSR-LN检测器通过24GHz频段实现95% 以上分型精度 城市交叉口 信号优化:智能交叉口专用雷达支持零退后安装(距车道0.5米),实时提供排队长度、占有率数据,赋能红绿灯智能配时 违法抓拍:窄波束雷达(垂直分辨率0.3米)精准触发摄像头,解决相邻车道干扰问题 特殊节点 桥梁隧道:侧装式雷达(如MPR-S1)无需路面施工,特别适合高架路段 智慧泊车:停车场引导系统通过雷达检测空位,提升周转率 四、市场竞合:国产化替代的机遇与挑战 中国毫米波雷达市场呈现高速增长与国产替代双重特征: 规模扩张:2022年市场规模130.41亿元,预计2026年达197亿元(CAGR 23.3%) 竞争格局:国际Tier1(博世/大陆等)主导市场,国内行易道、智波科技等企业加速追赶 技术瓶颈:MMIC、DSP等核心部件95%依赖进口,国产芯片可靠性亟待验证 成本优势使国产24GHz产品仍占主流。例如MVR-Y1检测器以24.125GHz频段实现: 双向12车道覆盖 车流量检测精度>98% 90000小时平均无故障时间 单价较进口80GHz设备低40% 但92-94GHz赛道已现领跑者。除河北项目外,广东等20个数字化转型试点省份将毫米波雷达纳入强感知路线,2025-2026年度的投资额考核将进一步推动新频段设备采购。 五、未来趋势:融合感知与成本破局的交响曲 随着智慧交通进入深度数字化阶段,微波雷达的发展将呈现三大趋势: 多传感器融合:雷达+视频+激光的全息感知体系成为高速/城市快速路标配 芯片国产化提速:国内头部半导体企业(如英飞凌合作伙伴)加速94GHz芯片量产,预计2026年成本下降30% 边缘智能升级:新一代雷达内置AI芯片,实现本地化交通事件分析,响应时延<100ms 面对92-94GHz雷达的量产挑战,头部厂商正通过三环降本策略破局: 研发层:加大算法预研投入,减少后期调整 生产层:导入自动化生产线,将次品率控制在0.1%以下







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}