
交通测速雷达:守护道路安全的科技卫士
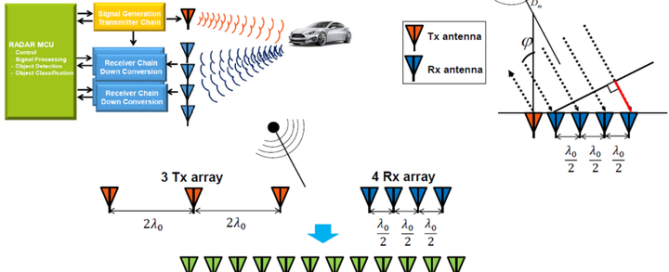
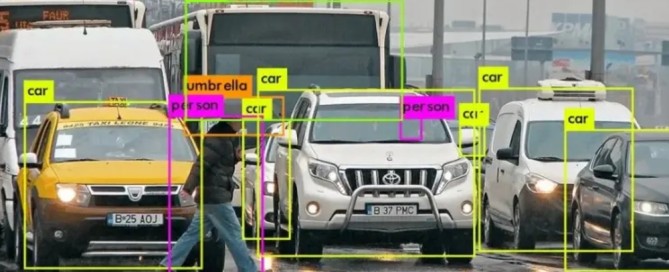
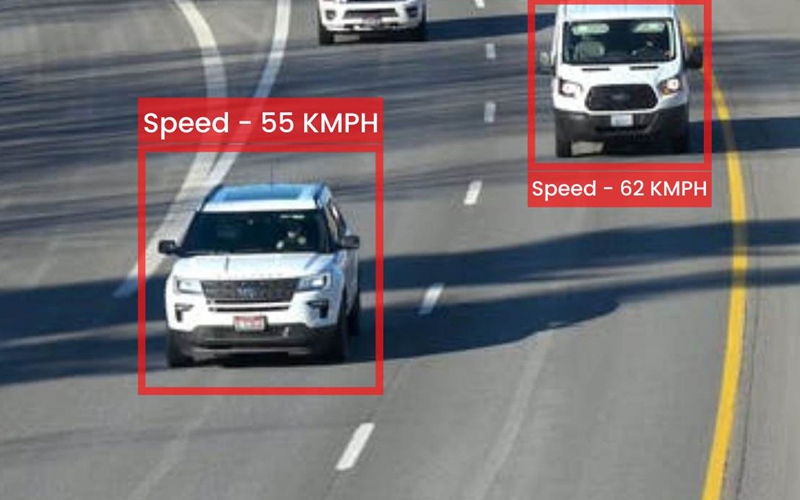
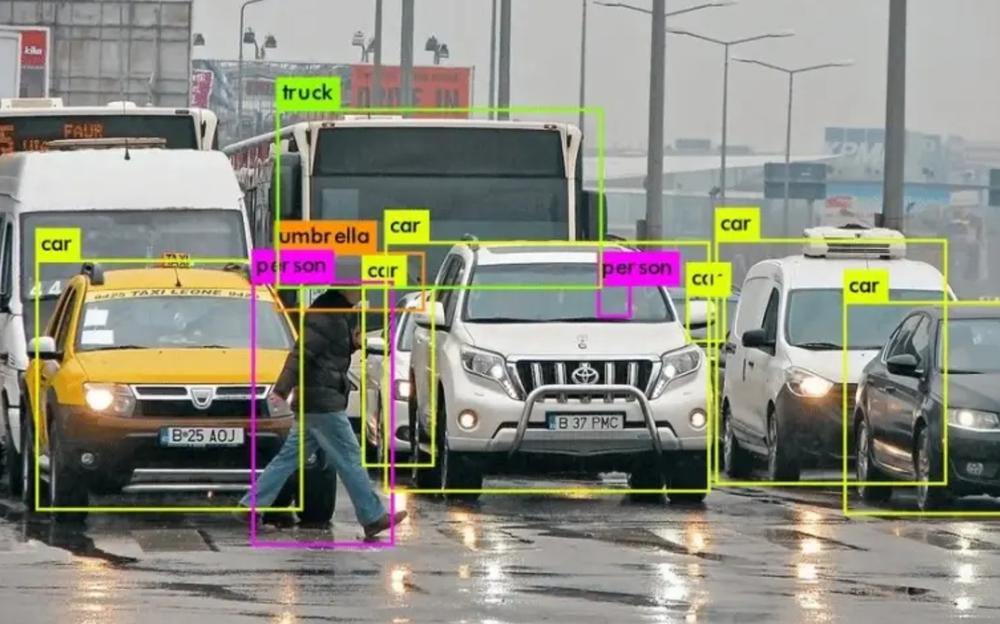
交通测速雷达:守护道路安全的科技卫士 一、引言 在现代交通体系中,确保道路安全与顺畅至关重要。随着汽车保有量的持续增长,交通管理面临着巨大挑战。交通测速雷达作为一种关键的交通监测设备,在维护交通秩序、保障公众出行安全方面发挥着不可或缺的作用。它凭借高精度的测速能力,成为交通执法部门的得力助手,有效遏制了超速等违法行为,降低了交通事故的发生率。同时,交通测速雷达也为智能交通系统提供了关键数据支持,助力优化交通流量,提升道路通行效率。接下来,让我们深入探究交通测速雷达的奥秘。 二、交通测速雷达的工作原理 (一)多普勒效应的神奇应用 交通测速雷达主要基于多普勒效应来实现测速功能。当雷达向目标车辆发射电磁波时,若车辆朝着雷达运动,反射波的频率会高于发射波的频率;反之,若车辆背离雷达运动,反射波的频率则低于发射波的频率。这种频率的变化与车辆和雷达之间的相对速度密切相关。通过精确测量反射波与发射波之间的频率差异,并运用复杂的信号处理算法,就能准确计算出车辆的行驶速度。例如,当一辆汽车以较快速度靠近雷达时,反射波的频率会显著升高,雷达系统根据预设的算法,迅速得出车辆的具体速度数值。 (二)先进的信号处理技术 为了进一步提高测速的准确性和可靠性,现代交通测速雷达采用了先进的数字信号处理技术。该技术能够对接收的反射信号进行滤波,去除环境噪声和其他干扰信号,确保信号的纯净度;然后对信号进行放大,增强信号的强度,以便更清晰地识别和分析;接着进行采样,将连续的模拟信号转换为离散的数字信号,便于计算机进行处理;最后通过复杂的算法对采样后的数字信号进行分析,精确提取出车辆的速度信息。例如,在城市复杂的交通环境中,周围存在各种电磁干扰,但先进的信号处理技术能够让雷达准确地从杂乱的信号中筛选出目标车辆的速度信号,保证测速结果的精准性。 三、交通测速雷达的类型 (一)固定式测速雷达 1. 安装位置与特点:固定式测速雷达通常安装在交通流量较大、事故多发路段或需要严格控制车速的区域,如学校、医院附近,以及高速公路的特定路段等。它具有安装固定、稳定性强的特点,能够长时间不间断地对过往车辆进行测速监测。其安装位置经过精心规划和设计,确保能够覆盖特定的监测区域,对车辆速度进行全面、准确的监控。 2. 在交通管理中的作用:在交通管理中,固定式测速雷达发挥着重要作用。它能持续监测路段上车辆的行驶速度,为交通执法提供有力证据。一旦发现车辆超速,系统可自动触发抓拍装置,记录车辆的违法瞬间,包括车辆的外观、车牌号码、行驶速度以及违法时间等详细信息,为后续的违法处理提供确凿依据。同时,其长期积累的测速数据也有助于交通管理部门分析该路段的交通流量和车速分布情况,从而优化交通规划,如合理调整限速标准、设置交通标志和标线等。 (二)移动式测速雷达 1. 便携性与灵活性优势:移动式测速雷达最大的优势在于其便携性和灵活性。它体积小巧,易于携带,可安装在警车、三脚架等移动载体上。交警可以根据实际交通管理需求,随时将其部署到不同的路段进行临时测速执法。例如,在一些施工路段、临时交通管制区域或超速行为频发的隐蔽路段,移动式测速雷达能够迅速发挥作用,对过往车辆进行测速检查,有效打击超速违法行为。 2. 执法应用场景:在实际执法中,移动式测速雷达应用广泛。交警在日常巡逻过程中,可将移动式测速雷达安装在警车上,实时监测道路上车辆的速度。一旦发现可疑超速车辆,交警能够及时进行拦截和处理。此外,在一些重大活动期间或交通流量异常时,交警也可通过在重点路段临时设置移动式测速雷达,加强对车辆速度的管控,确保交通秩序的稳定。 四、交通测速雷达在不同场景的应用 (一)公路交通执法 1. 超速抓拍与处罚依据:在公路交通中,交通测速雷达是打击超速违法行为的重要手段。无论是高速公路上疾驰的车辆,还是城市快速路、普通公路上行驶的汽车,测速雷达都能精准地测量其速度。一旦车辆速度超过法定限速,雷达系统立即触发高清摄像头,抓拍车辆的违法画面。这些抓拍的图像和准确的测速数据成为交警对超速车辆进行处罚的直接依据,有力地约束了驾驶员的行为,促使他们严格遵守交通法规,按照规定速度行驶。 2. 维护道路交通安全秩序:通过对超速车辆的监测和处罚,交通测速雷达有效地维护了道路交通安全秩序。研究表明,在安装了交通测速雷达并严格执行超速处罚的路段,车辆的平均行驶速度明显降低,超速违法行为大幅减少,交通事故的发生率也随之显著下降。例如,某高速公路路段在安装测速雷达后,超速违法行为减少了 40%,交通事故发生率降低了 30%,极大地保障了道路上车辆和行人的安全。 (二)智能交通系统 1. 提供关键数据支持:交通测速雷达在智能交通系统中扮演着数据提供者的重要角色。它实时监测到的车辆速度、流量等数据,通过通信网络传输至交通管理中心的大数据平台。这些数据与其他交通监测设备(如道路传感器、视频监控等)采集的数据进行融合分析,为智能交通系统的各项功能提供了基础支撑。例如,交通管理部门可以根据测速雷达提供的数据,准确掌握道路上的实时交通状况,及时发现交通拥堵路段,并通过智能交通信号控制系统对信号灯的配时进行优化,提高道路的通行能力。 2. 助力交通流量优化:基于交通测速雷达的数据,智能交通系统能够实现对交通流量的有效优化。例如,通过分析不同路段、不同时段的车速和流量数据,系统可以预测交通拥堵的发生,并提前采取措施进行疏导。在一些城市,智能交通系统根据测速雷达反馈的数据,动态调整可变车道的通行方向,引导车辆合理分流,有效缓解了交通拥堵。同时,测速雷达数据还可用于为驾驶员提供实时的交通路况导航服务,引导车辆选择最优行驶路线,提高整个城市交通网络的运行效率。 (三)特殊区域监测 1. 学校、医院周边的应用:在学校、医院等特殊区域,人员密集,对交通安全要求极高。交通测速雷达安装在这些区域周边,能够严格控制车辆的行驶速度。当车辆驶入监测区域时,雷达实时监测车速,一旦发现车辆超速,立即发出警报,并可通过电子显示屏等设备向驾驶员提示限速信息。这有助于保障学校学生和医院患者的出行安全,营造安全、有序的周边交通环境。 2. 施工路段的安全保障:在道路施工路段,路况复杂,车辆行驶速度需要严格控制,以确保施工人员和过往车辆的安全。交通测速雷达在施工路段的应用,能够实时监测车辆速度,防止车辆因车速过快而引发交通事故。同时,雷达数据还可反馈给施工管理部门,以便根据实际交通状况合理调整施工安排,保障施工的顺利进行和交通的正常通行。 五、交通测速雷达的技术发展趋势 (一)更高的测速精度 随着科技的不断进步,交通测速雷达的测速精度将不断提高。未来的测速雷达将采用更先进的硬件设备和算法,进一步降低测量误差。例如,通过优化雷达的发射和接收电路,提高信号的稳定性和分辨率;采用更复杂、精确的信号处理算法,对反射信号进行更细致的分析和处理。预计在不久的将来,交通测速雷达的测速精度将达到更高的水平,为交通执法和管理提供更加准确的数据支持。 (二)多目标监测能力提升 在复杂的交通环境中,同一时刻可能有多个车辆在不同车道行驶。为了更好地适应这种情况,交通测速雷达的多目标监测能力将不断提升。新一代的测速雷达将能够同时准确监测多个目标车辆的速度、位置和行驶方向等信息,并且能够对不同车辆的信号进行有效区分和处理。这将大大提高交通管理的效率,例如在多车道高速公路上,测速雷达能够同时对所有车道的车辆进行监测,及时发现并处理超速等违法行为,避免因漏测而导致的交通隐患。 (三)与其他技术的融合 1. 与人工智能技术结合:交通测速雷达与人工智能技术的结合将为交通管理带来新的变革。人工智能算法可以对雷达采集的数据进行更深入的分析和挖掘,实现对交通流量的精准预测、对异常交通行为的智能识别以及对交通事件的快速预警。例如,通过机器学习算法,雷达系统能够自动识别车辆的类型、判断车辆是否存在违规变道、急刹车等危险行为,并及时向交通管理部门发出警报。同时,人工智能还可以根据实时交通数据,优化雷达的工作参数,提高其测速性能和适应复杂环境的能力。 2. 与物联网技术协同:与物联网技术的协同发展,将使交通测速雷达成为智能交通物联网中的重要节点。通过物联网,测速雷达可以与其他交通设备(如信号灯、智能路灯、电子警察等)实现互联互通,实现数据共享和协同工作。例如,当测速雷达检测到某路段车辆超速严重时,可自动将信息传输给附近的信号灯,调整信号灯的配时,对车辆进行限流;同时,也可将数据发送给智能路灯,通过路灯上的显示屏向驾驶员发出警示信息。这种协同工作模式将大大提升智能交通系统的整体效能,实现更加智能化、高效化的交通管理。 六、结语 交通测速雷达作为交通管理领域的重要技术装备,在保障道路交通安全、提升交通运行效率方面发挥着不可替代的作用。从其基于多普勒效应的工作原理,到固定式、移动式等多种类型的应用,再到在公路执法、智能交通系统以及特殊区域监测等场景的广泛使用,交通测速雷达已经深度融入现代交通体系。随着科技的不断发展,交通测速雷达在测速精度、多目标监测能力以及与其他先进技术融合等方面将取得更大突破,为构建更加安全、高效、智能的交通环境提供坚实的技术支撑。无论是交通管理部门维护交通秩序,还是普通民众安全出行,交通测速雷达都将持续发挥关键作用,成为守护道路安全的忠诚卫士。在未来,我们有理由相信,交通测速雷达将不断创新发展,为人们的出行带来更多的便利和保障。







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}