
如何选择合适的测速指示牌
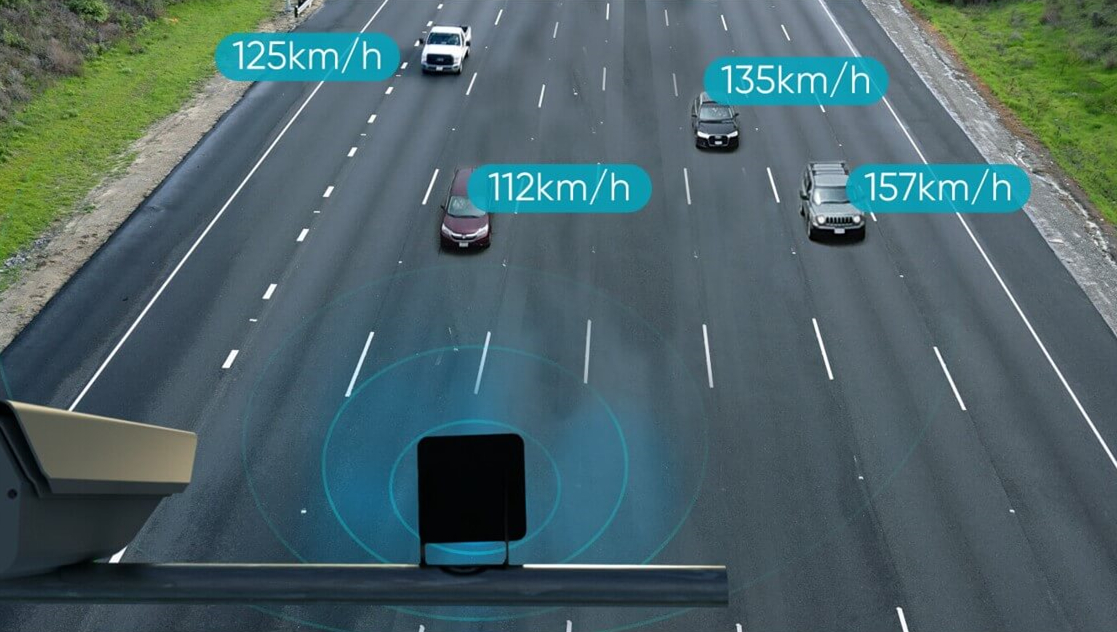
如何选择合适的测速指示牌 测速指示牌作为保障道路交通安全的关键设施,它既能规范车辆行驶速度,有效减少交通事故的发生,又为交通管理部门提供了有力的执法依据。然而,面对市面上各式各样、功能不同的测速指示牌,交通管理部门、道路建设者以及相关从业者该如何挑选出最适宜的产品,成了亟待深入思考的问题。本文将从多个层面,详尽探讨选择合适测速指示牌的关键要点。 一、依据使用场景选择 1、高速公路场景 高速公路具备车速快、车流量大的特点,这对测速指示牌的性能提出了严苛要求。在安装形式上,大型的悬臂式或门架式测速指示牌较为理想。其安装高度通常在 5 米至 7 米左右,该高度能确保驾驶员在高速行驶时,从远距离就能清晰识别指示牌信息。 就测速范围而言,鉴于高速公路最高限速一般为 120 公里 / 小时,测速指示牌的测速范围必须涵盖这一数值,且要具备极高精度。研究显示,在高速公路上,若测速误差超过 5%,就可能导致对超速行为的误判或漏判,进而削弱测速指示牌的监管效能。因此,其测速误差应严格控制在较小范围内,一般建议不超过 ±2 公里 / 小时。 2、城市道路场景 城市道路状况复杂,行人、非机动车与机动车混行,车速相较于高速公路较慢,但变化频繁。立柱式测速指示牌更契合城市道路,其安装高度一般在 3 米至 5 米,这样既不会影响城市道路美观,又能保证驾驶员在正常行驶视角下清晰读取信息。 城市道路不同路段的限速差异显著,从学校、商业区附近的 30 - 40 公里 / 小时,到一些主干道的 60 - 80 公里 / 小时。所以,测速指示牌的测速范围需能灵活适应这些不同的限速要求。同时,为避免分散驾驶员在复杂城市环境中的注意力,指示牌的显示内容应简洁明了,突出关键信息,如当前路段限速值和车辆实时速度。 3、 特殊区域场景 学校区域:学校周边是儿童活动频繁的区域,保障交通安全极为重要。小型的太阳能测速指示牌是不错的选择,其安装高度一般在 2.5 米至 4 米,方便灵活安装,且太阳能供电方式节能环保,契合学校这类对环境要求较高的场所。测速范围通常设定在 20 公里 / 小时至 40 公里 /






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}